
ویژه نامه واسط مغز و رایانه - شماره 9
سیستم های BCI را میتوان بر اساس فاکتور های مختلف همچون موضوع مورد بحث یا مؤلفه الکتروفیزیولوژی مورد استفاده، جامعه مورد هدف و .. دستهبندی کرد.
انواع سیستم های BCI
سیستم های BCI را میتوان بر اساس فاکتور های مختلف همچون موضوع مورد بحث یا مؤلفه الکتروفیزیولوژی مورد استفاده، جامعه مورد هدف و .. دستهبندی کرد.
در زیر برخی از رایج ترین انواع سیستم های BCI که بر اساس مؤلفه الکتروفیزیولوژی مورد استفاده یا بر اساس نوع فعالیت ذهنی مورد تقسیم قرار گرفتهاند، معرفی شدهاند. کنید.
سیستم های BCI مبتنی بر مولفه شناختی P300
یکی از معروف ترین زیر گروه های سیستم های BCI سیستم های مبتنی بر مولفه P300 هستند.
مولفه P300 یک مؤلفه شناختی است که در اثر جلب توجه فرد به یک رویداد غیر منتظره، در سیگنال EEG وی ظاهر می شود. بنابر ماهیت سیگنال P300، در سیستم های BCI مبتنی بر این مؤلفه، از یک محرک تصویری و یا شنوایی با نام oddball paradigm استفاده میشود که مجموعه ای از اتفاقات است که در بین آن ها اتفاقی غیر منتظره رخ میدهد (مجموعهای از تحریکهای دیداری یا شنیداری به صورت تصادفی ارائه میگردد، که تعداد تکرار محرک هدف در مقایسه با محرک غیر هدف کمتر است، به گونه ای که ظاهر شدن محرک هدف نوعی رخداد غیرمنتظره میباشد). وقوع این محرک غیرمنتظره سبب جلب توجه فرد و برانگیخته شدن مولفه P300 که یک مؤلفه شناختی مرتبط با توجه است، می شود.
در این سیستم ها هدف یافتن مؤلفه P300 و ترجمه وقوع این مؤلفه به هدف مد نظر می باشد. هدف مدنظر این دسته از سیستم ها می تواند تایپ جملات، حرکت دادن یک وسیله همچون ویلچر و یا یک وظیفه مشخص دیگر باشد که محقق یا طراح مد نظر دارد. (شکل 1-9 را ببنید).
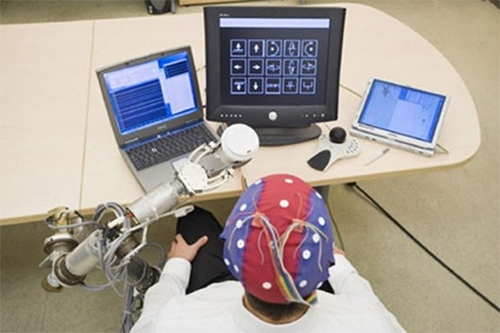
شکل 1-9) در این تصویر یک سیستم BCI مبتنی بر مولفه شناختی P300 نشان داده شده است که در آن با استفاده از یک پارادایم آدبال تعدادی از دستورات مشخص به فرد نشان داده می شود. سیستم پس از ترجمه حرکت مد نظر کاربر بر اساس مولفه p300 رخ داده در سیگنال EEG، دستورات لازم را به بازوی ربات ارسال می کند تا حرکت مد نظر، توسط ربات صورت گیرد.
سیستم های BCI مبتنی بر تصور حرکت (MI-BCI)
دسته بعدی از سیستم های BCI ، سیستمهای مبتنی بر تصور حرکت هستند که در آن فرد، حرکت خاص و مشخصی را متصور می شود و سپس در سیستم BCI یک عمل مشخصی اجرا میشود. این عمل انجام شده می تواند رنج وسیعی از موارد همچون حرکت یک بازوی رباتیک مطابق با تصور، کنترل ویلچر با تصور حرکت آن، برقراری ارتباط با محیط، حرکت ماوس کامپیوتر، انجام حرکت توسط یک کاراکتر در یک بازی کامپیوتری و یا حرکت یک اندام پروتزی متصل به فرد معلول را شامل شود. (شکل 2-9 را ببنید)
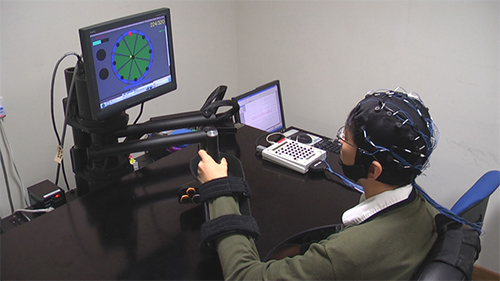
شکل 2-9 ) در این تصویر یک سیستم توان بخشی ترکیبی(شامل یک سیستم BCI مبتنی بر تصور حرکت و یک ربات توان بخشی MIT-Manus ) نشان داده شده است. سیستم BCI ، حرکت متصور شده توسط فرد را به سیگنال های قابل درک برای ربات تبدیل کرده و ربات حرکت متصور شده را انجام می دهد.

نوشته های مرتبط